Учёные из Университета Ватерлоо, Канада, представили мягкого робота, вдохновлённого гекконами и гусеницами. Однажды подобные роботы будут помогать в хирургических операциях, в операциях МЧС, или в иных условиях. Они отлично удерживаются и перемещаются по вертикальным поверхностям и даже вниз головой по потолкам. Но самое невероятное, что им для этого не нужно питание — оно внешнее и без проводов.
Источник изображений: University of Waterloo
Прототип ползающего где угодно и даже по стеклу робота представлен моделью длиной 10 см и шириной 3 мм. Он может как геккон постепенно отлеплять лапку и переносить корпус вперёд для продвижения. На стекле и других поверхностях «лапка» робота удерживается благодаря вандерваальсовым силам межмолекулярного взаимодействия, которое возникает между микроскопическими частями «лапок» и поверхности.
Главная фишка разработки — внешнее управление сокращением корпуса робота и процессом отцепления «лапки» и последующего её удержания на новом месте. Корпус — мягкая спинка и обе лапки — изготовлены из эластомера с наполнением жидкими кристаллами, чувствительными к ультрафиолетовому излучению. УФ-свет заставляет корпус изгибаться подобно спине гусеницы во время движения. Магнит не даёт лапкам оторваться от поверхности в такие моменты до того, как подушечки на лапках не войдут в тесный контакт с поверхностью и не закрепятся там.
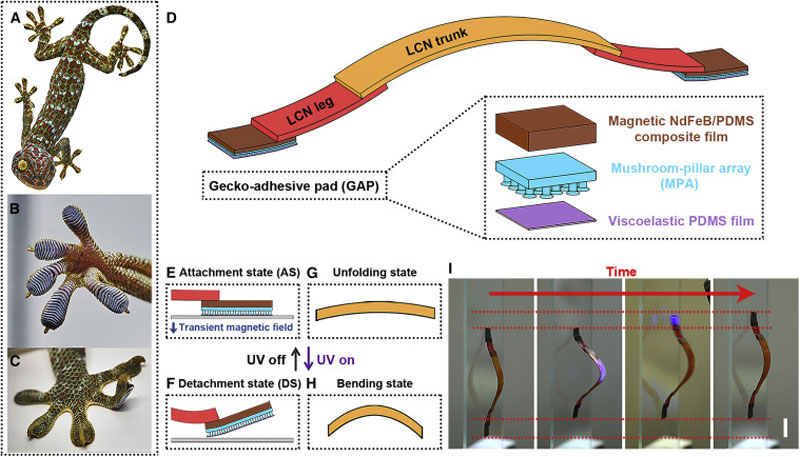
Источник изображений: Cell Reports Physical Science
Чередуя направление УФ-прожектора и места подвода электромагнитного поля, учёные заставляют робота как гусеницу двигаться по маршруту. Бесконтактное питание движителей позволит передвигаться, например, миниатюрному медицинскому роботу по кровеносным сосудам человека или в иных труднодоступных местах тела для проведения тонких операций. Роботы большего масштаба смогут помочь в чрезвычайных ситуациях для проникновения в аварийные зоны.
«Эта работа — первый случай, когда целостный мягкий робот взбирается на перевернутые поверхности, продвигая современные инновации в области мягкой робототехники, — сказал один из авторов исследования. — Мы с оптимизмом смотрим на его потенциал, который при дальнейшем развитии может быть использован в различных областях».
Следующим шагом исследователей станет разработка исключительно светового механизма управления передвижением мягкого робота, который не потребует магнитного поля и будет использовать ближнее инфракрасное излучение вместо ультрафиолетового света для улучшения биосовместимости, поскольку УФ-излучение для контакта с живым организмом следует использовать с крайней осторожностью.