Опытным экскаваторщикам знаком трюк, который позволяет отправлять содержимое ковша за пределы досягаемости стрелы. Наделённый нейросетью робоэкскаватор оказался прилежным учеником, который также смог освоить прицельное метание камней дальше зоны досягаемости стрелы. На очереди швыряние сыпучих материалов и повышение точности для работы ковшом на разных высотах.
Источник изображения: ETH Zürich
О процессе обучения нейросети робоэкскаватора для точного манипулирования содержимым ковша сообщили исследователи из Швейцарии (ETH Zürich). Нейросеть на основе обучения с подкреплением была обучена бросать мяч и камни в указанную точку, которая была дальше досягаемости стрелы (до 9,5 м при дальности захвата стрелой 7,5 м). Подобные операции помогут робототехнике справляться с большим кругом задач с меньшими затратами энергии на перемещения, а также сделают её работу более безопасной.
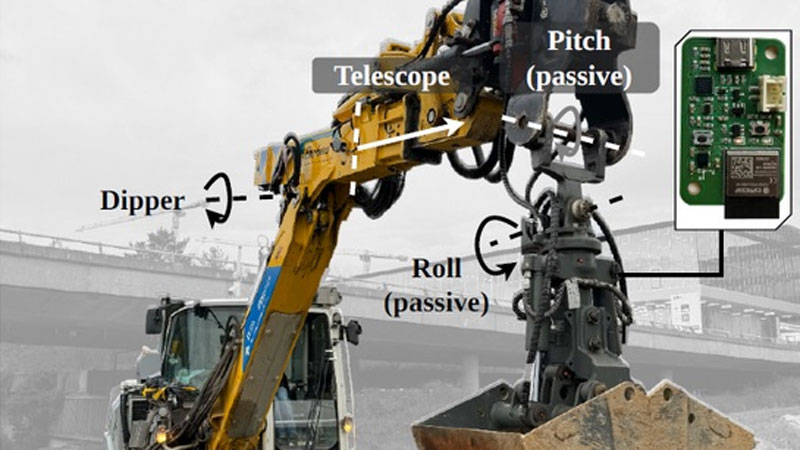
Экскаватор совершал захват и броски ковшом с двумя степенями свободы, который не был жёстко закреплён на стреле. Броски совершались как по прямой, когда в работе была одна только стрела, так и с поворотом кабины. Во втором случае точность была чуть меньше, но в любом случае снаряд отклонялся от точки прицеливания не более чем на 30–40 см.
Исследователи обучали нейросеть на базе модернизированного 12-т колёсного экскаватора Menzi Muck M545. Ранее они обучили экскаватор ряду нетривиальных операций, например, научив его строить устойчивую стену из неподготовленных каменных блоков. Экскаватор сам оценивал баланс камней и строил прочное каменное ограждение. Для точных автономных работ на местности экскаватор с помощью установленных на него датчиков строит модель окружающего пространства, в котором выполняет заданные операции.