






 MWC 2018
MWC 2018 2018
2018 Computex
Computex
⇣ Содержание
|
Опрос
|
реклама
Самое интересное в новостях
Первый полет «Союз МС»: полвека эволюции
⇡#Рождение «Союза»Первые пилотируемые корабли-спутники серии «Восток» (индекс 3КА) создавались для решения узкого круга задач — во-первых, чтобы опередить американцев, и, во-вторых, чтобы определить возможности жизни и работы в космосе, изучить физиологические реакции человека на факторы орбитального полёта. Корабль блестяще справился с поставленными задачами. С его помощью был осуществлён первый прорыв человека в космос («Восток»), состоялась первая в мире суточная орбитальная миссия («Восток-2»), а также первые групповые полёты пилотируемых аппаратов («Восток-3» — «Восток-4» и «Восток-5» — «Восток-6»). Первая женщина попала в космос также на этом корабле («Восток-6»). Развитием этого направления стали аппараты с индексами 3КВ и 3КД, с помощью которых были осуществлены первый орбитальный полёт экипажа из трёх космонавтов («Восход») и первый выход человека в открытое космическое пространство («Восход-2»). 
Первый в мире космический корабль «Восток». Графика А. Шлядинского Однако ещё до того, как были установлены все эти рекорды, руководителям, конструкторам и проектантам королёвского Опытного конструкторского бюро (ОКБ-1) было ясно, что для решения перспективных задач лучше подойдёт не «Восток», а другой корабль, более совершенный и безопасный, обладающий расширенными возможностями, увеличенным ресурсом систем, удобный для работы и комфортный для жизни экипажа, обеспечивающий более щадящие режимы спуска и большую точность посадки. Для повышения научной и прикладной «отдачи» требовалось увеличить численность экипажа, введя в него узких специалистов — врачей, инженеров, учёных. Кроме того, уже на рубеже 1950—1960-х годов создателям космической техники было очевидно, что для дальнейшего изучения космического пространства нужно освоить технологии встречи и стыковки на орбите для сборки станций и межпланетных комплексов. Летом 1959 года в ОКБ-1 начался поиск облика перспективного пилотируемого корабля. После обсуждений целей и задач нового изделия было решено разработать достаточно универсальный аппарат, пригодный как для околоземных полётов, так и для облётных лунных миссий. В 1962 году в рамках этих изысканий был инициирован проект, получивший громоздкое название «Комплекс сборки космических аппаратов на орбите спутника Земли» и короткий шифр «Союз». Основной задачей проекта, в ходе решения которой предполагалось освоить орбитальную сборку, был облёт Луны. Пилотируемый элемент комплекса, имевшего индекс 7К-9К-11К, получил название «корабль» и имя собственное «Союз». 
Комплекс сборки космических аппаратов на орбите спутника Земли («Союз») должен был включать двухместный пилотируемый корабль для облёта Луны, разгонный блок для старта с околоземной орбиты и серию орбитальных танкеров-заправщиков. Рисунок В. Некрасова из архива «Новостей космонавтики» Принципиальным его отличием от предшественников были возможности стыковки с другими аппаратами комплекса 7К-9К-11К, полёта на большие (вплоть до орбиты Луны) расстояния, входа в земную атмосферу со второй космической скоростью и посадки в заданном районе территории Советского Союза. Отличительной чертой «Союза» стала компоновка. Он состоял из трёх отсеков: бытового (БО), приборно-агрегатного (ПАО) и спускаемого аппарата (СА). Такое решение позволило обеспечить приемлемый обитаемый объём для экипажа из двух-трёх человек без существенного роста массы конструкции корабля. Дело в том, что спускаемые аппараты «Востоков» и «Восходов», покрытые слоем теплозащиты, содержали системы, нужные не только для спуска, но и для всего орбитального полёта. Вынеся их в другие отсеки, не имеющие тяжёлой теплозащиты, проектанты могли заметно сократить общий объём и массу спускаемого аппарата, а значит, значительно облегчить весь корабль. Надо сказать, что по принципам разбиения на отсеки «Союз» мало чем отличался от своих заокеанских конкурентов — кораблей Gemini и Apollo. Однако американцам, обладающим большим преимуществом в области микроэлектроники с высоким ресурсом, удавалось создавать сравнительно компактные аппараты, не разделяя жилой объём на независимые отсеки. 
Американский корабль Gemini был принципиально близок к «Союзу», но не имел дополнительного обитаемого отсека и оказался легче благодаря некоторым технологическим преимуществам Из-за симметричного обтекания при возвращении из космоса сферические спускаемые аппараты «Востоков» и «Восходов» могли совершать лишь неуправляемый баллистический спуск с достаточно большими перегрузками и невысокой точностью. Опыт первых полётов показал, что эти корабли при посадке могли отклоняться от заданной точки на сотни километров, что значительно затрудняло работу специалистов по поиску и эвакуации космонавтов, резко увеличивая контингент сил и средств, привлекаемых для решения этой задачи, зачастую заставляя их рассредоточиваться по огромной территории. Например, «Восход-2» сел со значительным отклонением от расчётной точки в таком труднодоступном месте, что поисковики лишь на третьи (!) сутки смогли эвакуировать экипаж корабля. Спускаемый аппарат «Союза» обрёл сегментально-коническую форму «фары» и при выборе определённой центровки летел в атмосфере с балансировочным углом атаки. Несимметричное обтекание порождало подъёмную силу и давало аппарату «аэродинамическое качество». Этим термином определяется отношение подъёмной силы к лобовому сопротивлению в поточной системе координат при данном угле атаки. У «Союза» оно не превышало 0,3, но этого хватало, чтобы на порядок (с 300—400 км до 5—10 км) повысить точность приземления и вдвое-второе (с 8—10 до 3—5 единиц) снизить перегрузки при спуске, делая посадку гораздо более комфортной. 
Схема размещения космонавтов в спускаемом аппарате корабля «Союз» «Комплекс сборки космических аппаратов на орбите спутника Земли» не был реализован в первоначальном виде, но стал родоначальником многочисленных проектов. Первым был 7К-Л1 (известен под открытым названием «Зонд»). В 1967-1970 годах по этой программе было предпринято 14 попыток запуска беспилотных аналогов этого пилотируемого корабля, 13 из которых имели целью облёт Луны. Увы, по разным причинам лишь три можно считать успешными. До пилотируемых миссий дело не дошло: после облёта Луны американцами и высадки на лунную поверхность интерес руководства страны к проекту угас, и 7К-Л1 закрыли. Лунный орбитальный корабль 7К-ЛОК был частью пилотируемого лунного комплекса Н-1 — Л-3. В период с 1969 по 1972 год советская сверхтяжёлая ракета Н-1 стартовала четырежды, и каждый раз с аварийным исходом. Единственный «почти штатный» 7К-ЛОК погиб при аварии 23 ноября 1972 года в последнем пуске носителя. В 1974 году проект советской экспедиции на Луну был остановлен, а в 1976 году отменён окончательно. 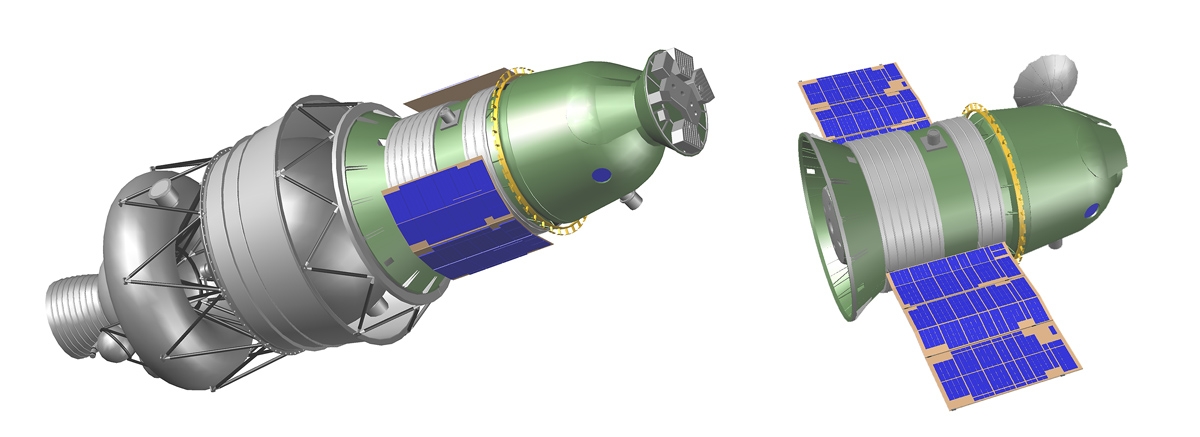
Корабль для облёта Луны 7К-Л1 «Зонд» на разгонном блоке и в полётной конфигурации. Графика А. Шлядинского В силу разных причин как «лунные», так и «орбитальные» ответвления проекта 7К-9К-11К не прижились, а вот семейство пилотируемых кораблей для проведения «тренировочных» операций по встрече и стыковке на околоземной орбите состоялось и получило развитие. Оно отпочковалось от темы «Союз» в 1964 году, когда было принято решение отработать сборку не в лунных, а в околоземных полётах. Так появился 7К-ОК, получивший в наследство имя «Союз». Основные и вспомогательные задачи первоначальной программы (управляемый спуск в атмосфере, стыковка на околоземной орбите в беспилотном и пилотируемом вариантах, переход космонавтов из корабля в корабль через открытый космос, первые рекордные автономные полёты на длительность) удалось решить за 16 запусков «Союзов» (восемь из них прошли в пилотируемом варианте, под «родовым» именем) до лета 1970 года. 
Космический корабль «Союз» 7К-ОК с активным стыковочным узлом. Графика А. Шлядинского ⇡#Оптимизация задачВ самом начале 1970-х годов Центральное конструкторское бюро экспериментального машиностроения (ЦКБЭМ, так с 1966 года стало называться ОКБ-1) на базе систем корабля 7К-ОК и корпуса орбитальной пилотируемой станции ОПС «Алмаз», спроектированной в ОКБ-52 В. Н. Челомея, разработало долговременную орбитальную станцию ДОС-7К («Салют»). Начало эксплуатации этой системы лишало смысла автономные полёты кораблей. Космические станции обеспечивали получение гораздо большего объёма ценных результатов из-за более длительной работы космонавтов на орбите и наличия места для установки различной сложной исследовательской аппаратуры. Соответственно, корабль, доставляющий экипаж к станции и возвращающий его на Землю, из многоцелевого превращался в одноцелевой транспортный. Эта задача была возложена на пилотируемые аппараты серии 7К-Т, созданные на базе «Союзов». 
Корабль «Союз-11» стыкуется со станцией «Салют-1». Графика А. Шлядинского Две катастрофы кораблей на базе 7К-ОК, произошедшие за сравнительно короткий период времени («Союз-1» 24 апреля 1967 года и «Союз-11» 30 июня 1971 года), заставили разработчиков пересмотреть концепцию безопасности аппаратов данной серии и провести модернизацию ряда основных систем, что негативно сказалось на возможностях кораблей (резко уменьшился срок автономного полёта, экипаж сократился с трёх до двух космонавтов, которые совершали теперь полёт на ответственных участках траектории одетыми в аварийно-спасательные скафандры). Эксплуатация транспортных кораблей типа 7К-Т при доставке космонавтов на орбитальные станции первого и второго поколения продолжилась, но выявила ряд крупных недостатков, обусловленных несовершенством служебных систем «Союза». В частности, управление движением корабля по орбите было слишком «привязано» к наземной инфраструктуре сопровождения, управления и выдачи команд, а используемые алгоритмы не страховались от ошибок. Поскольку СССР не имел возможности разместить наземные пункты связи по всей поверхности земного шара вдоль трассы, полёт космических кораблей и орбитальных станций значительную часть времени проходил вне зоны радиовидимости. Зачастую экипаж не мог парировать нештатные ситуации, возникающие на «глухой» части витка, а интерфейсы «человек — машина» были настолько несовершенными, что не позволяли в полной мере использовать возможности космонавта. Запас топлива для маневрирования оказался недостаточен, часто не позволяя осуществить повторные попытки стыковки, например при возникновении сложностей во время сближения со станцией. Во многих случаях это приводило к срыву всей программы полёта. 
Стыковка корабля «Союз-15» со станцией «Салют-3» («Алмаз») не удалась из-за отказа системы сближения транспортного корабля. Графика А. Шлядинского Для пояснения того, как разработчикам удалось справиться с решением этой и ряда других проблем, следует отступить немного назад во времени. Вдохновлённый успехами головного ОКБ-1 в области пилотируемых полётов, Куйбышевский филиал предприятия — ныне Ракетно-космический центр (РКЦ) «Прогресс» — под руководством Д. И. Козлова в 1963 году начал проектные проработки по военно-исследовательскому кораблю 7К-ВИ, который, кроме прочего, предназначался для разведывательных миссий. Не будем обсуждать саму проблему присутствия человека на спутнике-фоторазведчике, которая сейчас кажется по меньшей мере странной, — скажем лишь, что в Куйбышеве на основе технических решений «Союза» был сформирован облик пилотируемого аппарата, в значительной мере отличающегося от прародителя, но ориентированного на запуск с помощью ракеты-носителя того же семейства, что выводило корабли типа 7К-ОК и 7К-Т. Проект, в который закладывалось несколько изюминок, космоса так и не увидел, и был закрыт в 1968 году. Основной причиной обычно считают стремление руководства ЦКБЭМ монополизировать тематику пилотируемых полётов в головном конструкторском бюро. Оно предложило вместо одного корабля 7К-ВИ спроектировать орбитальную исследовательскую станцию (ОИС) «Союз-ВИ» из двух компонентов — орбитального блока (ОБ-ВИ), разработку которого поручили филиалу в Куйбышеве, и пилотируемого транспортного корабля (7К-С), который проектировался своими силами в Подлипках. 
Облик военно-исследовательского корабля 7К-ВИ с точки зрения художника журнала Flieger Revue Были задействованы многие решения и наработки, сделанные как в филиале, так и в головном КБ, однако заказчик — Министерство обороны СССР — признал более перспективным средством разведки уже упоминавшийся комплекс на основе ОПС «Алмаз». Несмотря на закрытие проекта «Союз-ВИ» и переброску значительных сил ЦКБЭМ на программу создания ДОС «Салют», работы по кораблю 7К-С продолжились: военные готовы были использовать его для проведения автономных экспериментальных полётов с экипажем из двух человек, а разработчики видели в проекте возможность создания на основе 7К-С модификаций корабля различного целевого назначения. Интересно, что проектированием занималась команда специалистов, не связанная с созданием 7К-ОК и 7К-Т. Поначалу разработчики пытались, сохранив общую компоновку, улучшить такие характеристики корабля, как автономность и способность к маневрированию в широких пределах, путём изменения силовой конструкции и мест расположения отдельных модифицированных систем. Однако по мере продвижения проекта стало ясно, что кардинальное улучшение функциональности возможно лишь путём внесения принципиальных изменений. 
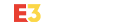
Устройство корабля «Союз-Т». Графика В. Некрасова из архива «Новостей космонавтики» В конечном итоге проект имел коренные отличия от базовой модели. 80% бортовых систем 7К-С были разработаны заново или значительно модернизированы, в аппаратуре применена современная элементная база. В частности, новая система управления движением «Чайка-3» строилась на базе бортового цифрового вычислительного комплекса на основе компьютера «Аргон-16» и бесплатформенной инерциальной навигационной системы. Принципиальным отличием системы стал переход от прямого управления движением по данным измерений к управлению на основе корректируемой модели движения корабля, реализованной в бортовом компьютере. Датчики навигационной системы измеряли угловые скорости и линейные ускорения в связанной системе координат, которая, в свою очередь, моделировались в компьютере. «Чайка-3» рассчитывала параметры движения и автоматически управляла кораблём в оптимальных режимах с наименьшим расходом топлива, вела самоконтроль с переходом — в случае необходимости — на резервные программы и средства, выдавая экипажу информацию на дисплей. Принципиально новым стал пульт космонавтов, установленный в спускаемом аппарате: основные средства отображения информации имели командно-сигнальные пульты матричного типа и комбинированный электронный индикатор на основе кинескопа. Принципиально новыми были приборы обмена информацией с бортовым компьютером. И пусть первый отечественный электронный дисплей обладал (как шутили некоторые специалисты) «интерфейсом куриного интеллекта», это уже был значительный шаг к тому, чтобы перерезать информационную «пуповину», связывающую корабль с Землёй. 
Пульт космонавтов спускаемого аппарата корабля «Союз-Т». Фото с сайта Была разработана новая двигательная установка с единой топливной системой для основного двигателя и микродвигателей причаливания и ориентации. Она стала надёжнее и вмещала больший запас топлива, чем раньше. На корабль вернули солнечные батареи, снятые после «Союза-11» для облегчения, усовершенствовали систему аварийного спасения, парашюты и двигатели мягкой посадки. При этом корабль внешне оставался очень похож на прототип 7К-Т. В 1974 году, когда Минобороны СССР решило отказаться от автономных военно-исследовательских миссий, проект переориентировали на транспортные полёты к орбитальным станциям, а численность экипажа довели до трёх человек, одетых в обновлённые аварийно-спасательные скафандры. ⇡#Другой корабль и его развитиеКорабль получил обозначение 7К-СТ. По совокупности многочисленных изменений ему даже планировали дать новое имя — «Витязь», однако в итоге обозначили как «Союз Т». Первый беспилотный полёт новый аппарат (ещё в варианте 7К-С) совершил 6 августа 1974 года, а первый пилотируемый «Союз Т-2» (7К-СТ) стартовал лишь 5 июня 1980 года. Столь длительный путь к регулярным миссиям обуславливался не только сложностью новых решений, но и определённым противодействием «старой» команды разработчиков, которые параллельно продолжали доработки и эксплуатацию 7К-Т — в период с апреля 1971 года по май 1981 года «старый» корабль 31 раз слетал под обозначением «Союз» и 9 раз как спутник «Космос». Для сравнения: с апреля 1978 года по март 1986 года 7К-С и 7К-СТ совершил 3 беспилотных и 15 пилотируемых полётов. 
Экспериментальный полёт Apollo – «Союз». Для стыковки использовался корабль модификации 7К-ТМ. Картина художника Роберта Маккола Тем не менее, завоевав место под солнцем, «Союз Т» со временем стал «рабочей лошадкой» отечественной пилотируемой космонавтики — именно на его базе началось проектирование следующей модели (7К-СТМ), предназначенной для транспортных полётов к высокоширотным орбитальным станциям. Предполагалось, что ДОС третьего поколения будут работать на орбите с наклонением 65° для того, чтобы трасса их полёта захватывала большую часть территории страны: при запуске на орбиту с наклонением 51° всё, что остаётся севернее трассы, недосягаемо для приборов, предназначенных для наблюдения с орбиты. Поскольку ракета-носитель «Союз-У» при запуске аппаратов к высокоширотным станциям недобирала примерно 350 кг массы полезного груза, она не могла вывести на нужную орбиту корабль в штатной комплектации. Необходимо было компенсировать потери грузоподъёмности, а также создать модификацию корабля, обладающую повышенной автономностью и ещё большими возможностями для маневрирования. Проблему с ракетой решили переводом двигателей второй ступени носителя (получил обозначение «Союз-У2») на новое высокоэнергетическое синтетическое углеводородное горючее «синтин» («циклин»). 
«Циклиновый» вариант ракеты-носителя «Союзу-У2» летал с декабря 1982 года по июль 1993 года. Фото Роскосмоса А корабль переделали, оснастив усовершенствованной двигательной установкой повышенной надёжности с увеличенным запасом топлива, а также новыми системами – в частности, старую систему сближения («Игла») заменили новой («Курс»), позволяющей проводить стыковку без переориентации станции. Теперь все режимы нацеливания, в том числе на Землю и Солнце, могли выполняться либо автоматически, либо при участии экипажа, а сближение осуществлялось на основе расчётов траектории относительного движения и оптимальных манёвров — они выполнялись с помощью бортового компьютера при использовании информации от системы «Курс». Для дублирования был введён телеоператорный режим управления (ТОРУ), позволявший в случае отказа «Курса» космонавту со станции взять управление на себя и вручную состыковать корабль. Корабль мог управляться по командной радиолинии или экипажем с использованием новых бортовых устройств ввода и отображения информации. Обновлённая система связи позволяла при автономном полёте связаться с Землёй через станцию, к которой летел корабль, что существенно расширяло зону радиовидимости. Вновь переделали двигательную установку системы аварийного спасения и парашюты (для куполов использовали облегчённый капрон, а для строп — отечественный аналог кевлара). Эскизный проект на корабль следующей модели — 7К-СТМ — был выпущен в апреле 1981 года, а лётные испытания начались с беспилотного запуска «Союза ТМ» 21 мая 1986 года. Увы, станция третьего поколения оказалась всего одна — «Мир», и летала она по «старой» орбите с наклонением 51°. Но пилотируемые полёты корабля, которые начались с февраля 1987 года, обеспечили не только успешную эксплуатацию этого комплекса, но и начальный этап работы МКС. 
Схема корабля «Союз ТМ» При проектировании вышеуказанного орбитального комплекса для существенного снижения продолжительности «глухих» витков была предпринята попытка создать спутниковую систему связи, контроля и управления на основе геостационарных спутников-ретрансляторов «Альтаир», наземных пунктов ретрансляции и соответствующей бортовой радиоаппаратуры. Такая система успешно использовалась при управлении полётом во время эксплуатации станции «Мир», однако оснастить подобной аппаратурой корабли типа «Союз» в то время всё же не могли. С 1996 года из-за высокой стоимости и отсутствия месторождений сырья на российской территории пришлось отказаться от использования «синтина»: начиная с «Союза ТМ-24» все пилотируемые корабли вернулись на носитель «Союз-У». Вновь возникла проблема недостаточной энергетики, которую предполагалось решать облегчением корабля и модернизацией ракеты. С мая 1986 года по апрель 2002 года были запущены 33 пилотируемых и 1 беспилотный аппарат серии 7К-СТМ — все они шли под обозначением «Союз ТМ». 
Корабль типа «Союз ТМ», пристыкованный к станции «Мир». En.wikipedia.org Следующая модификация корабля была создана для эксплуатации в международных миссиях. Её проектирование совпало с разработкой МКС, точнее со взаимной интеграцией американского проекта Freedom и российского «Мир-2». Поскольку стройку предполагалось осуществлять американскими шаттлами, которые не могли подолгу оставаться на орбите, в составе станции должен был постоянно дежурить аппарат-спасатель, способный в случае возникновения чрезвычайной ситуации безопасно вернуть экипаж на Землю. Соединённые Штаты работали над «космическим такси» CRV (Crew Return Vehicle) на базе аппарата с несущим корпусом X-38, а Ракетно-космическая корпорация (РКК) «Энергия» (так со временем стало называться предприятие — правопреемник «королёвского» ОКБ-1) предлагала корабль капсульного типа на базе масштабно увеличенного союзовского спускаемого аппарата. И тот и другой аппараты должны были доставляться на МКС в грузовом отсеке шаттла, который, кроме того, рассматривался как основное средство полёта экипажей с Земли на станцию и обратно. 
Корабль-спасатель CRV должны были делать американские фирмы при участии европейских организаций. Графика ЕКА 20 ноября 1998 года в космос был запущен первый элемент МКС — функционально-грузовой блок «Заря», созданный в России на американские деньги. Строительство началось. На этом этапе стороны осуществляли доставку экипажей на паритетной основе — шаттлами и «Союзами-ТМ». Большие технические сложности, вставшие на пути проекта CRV, и значительное превышение бюджета заставили прекратить разработку американского корабля-спасателя. Специальный российский корабль-спасатель тоже не был создан, но работы в этом направлении получили неожиданное (или закономерное?) продолжение. 1 февраля 2003 года при возвращении с орбиты погиб шаттл Columbia. Реальной угрозы закрытия проекта МКС не было, но ситуация оказалась критической. Стороны справились с возникшим положением, уменьшив экипаж комплекса с трёх до двух человек и приняв российское предложение о постоянном дежурстве на станции российского «Союза ТМ». Затем подтянулся модифицированный транспортный пилотируемый корабль «Союз ТМА», созданный на базе 7К-СТМ в рамках ранее достигнутого межгосударственного соглашения России и США как составная часть комплекса орбитальной станции. Главным его назначением стало обеспечение спасения основного экипажа станции и доставка экспедиций посещения. 
Схема размещения на МКС пилотируемых и грузовых транспортных кораблей. Графика HistoricSpacecraft.com По результатам ранее проведённых полётов международных экипажей на «Союзах ТМ» в конструкции нового корабля были учтены специфические антропометрические требования (отсюда и литера «А» в обозначении модели): среди американских астронавтов есть персоны, довольно сильно отличающиеся от российских космонавтов по росту и весу, причём как в большую, так и в меньшую сторону (см. таблицу). Надо сказать, что эта разница влияла не только на комфорт размещения в спускаемом аппарате, но и на центровку, что было важно для безопасной посадки при возвращении с орбиты и потребовало модификации системы управления спуском. Антропометрические параметры членов экипажа кораблей «Союз ТМ» и «Союз ТМА»
В спускаемом аппарате «Союза ТМА» установили три вновь разработанных удлинённых кресла с новыми четырёхрежимными амортизаторами, которые регулируются по массе космонавта. Оборудование в зонах, прилегающих к креслам, перекомпоновали. Внутри корпуса спускаемого аппарата в зоне подножек правого и левого кресел сделали выштамповки глубиной около 30 мм, которые позволили разместить рослых космонавтов в удлинённых креслах. Изменился силовой набор корпуса и прокладка трубопроводов и кабелей, расширилась зона прохода через входной люк-лаз. Установлены новый пульт управления, уменьшенный по высоте, новый холодильно-сушильный агрегат, блок запоминания информации и другие новые или дорабатываемые системы. Кабину экипажа по возможности расчистили от выступающих элементов, перенеся их в более удобные места. 
Органы управления и системы индикации, установленные в спускаемом аппарате «Союза ТМА»: 1 – командир и бортинженер-1 имеют перед собой интегрированные пульты управления (ИнПУ); 2 — цифровая клавиатура для введения кодов (для навигации по дисплею ИнПУ); 3 — блок управления маркером (для навигации по дисплею ИнПУ); 4 — блок электролюминесцентной индикации текущего состояния систем; 5 — ручные поворотные вентили РПВ-1 и РПВ-2, отвечающие за наполнение магистралей дыхания кислородом; 6 — электропневмоклапан подачи кислорода при посадке; 7 — командир корабля наблюдает за стыковкой через перископический «Визир специальный космонавта (ВСК)»; 8 — с помощью ручки управления движением (РУД) кораблю придаётся линейное (положительное или отрицательное) ускорение; 9 — с помощью ручки управления ориентацией (РУО) кораблю задаётся вращение; 10 — вентилятор холодильно-сушильного агрегата (ХСА), выводящего из корабля тепло и излишнюю влагу; 11 — тумблеры включения вентиляции скафандров при посадке; 12 — вольтметр; 13 — блок предохранителей; 14 — кнопка запуска консервации корабля после стыковки с орбитальной станцией В очередной раз доработали комплекс средств приземления — он стал более надёжным и позволял уменьшить перегрузки, возникающие после спуска на запасной парашютной системе. Проблему спасения полностью укомплектованного экипажа МКС из шести человек в конечном итоге решили одновременным нахождением на станции двух «Союзов», которые с 2011 года, после ухода шаттлов в отставку, стали единственными пилотируемыми кораблями в мире. Для подтверждения надёжности был проведён значительный (по нынешним временам) объём экспериментальной отработки и макетирование с контрольной примеркой экипажей, включая астронавтов NASA. В отличие от кораблей предыдущих серий, беспилотных запусков не проводилось: первый старт «Союза ТМА-1» состоялся 30 октября 2002 года сразу с экипажем. Всего до ноября 2011 года было запущено 22 корабля данной серии. 
«Союз ТМА-15» отстыковался от МКС. Фото NASA
⇣ Содержание
Если Вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
Материалы по теме
|
© 1997—2025 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.
![]()





 Подписаться
Подписаться